Localisation précise de robots miniatures et d'instruments chirurgicaux à l'intérieur du corps
Ce qui, il y a peu, relevait de la science-fiction est aujourd'hui bien avancé : des nanorobots qui se déplacent de manière autonome dans le corps
Annonces



Dans la médecine du futur, de minuscules robots navigueront de manière autonome dans les tissus et des instruments médicaux indiqueront leur position à l'intérieur du corps pendant l'opération. Dans les deux cas, les médecins doivent être en mesure de localiser et de contrôler les appareils avec précision et en temps réel. Jusqu'à présent, il n'existait pas de méthode appropriée pour ce faire. Des scientifiques du Centre allemand de recherche sur le cancer (DKFZ) viennent de décrire une méthode de signalisation basée sur un aimant oscillant qui peut améliorer considérablement ces applications médicales.
Ce qui, il y a peu, relevait de la science-fiction est aujourd'hui bien avancé dans le développement : Les nanorobots qui se déplacent de manière autonome dans le corps devraient permettre de transporter des médicaments, de prendre des mesures dans les tissus ou d'effectuer des interventions chirurgicales. Des nanorobots à entraînement magnétique qui naviguent dans les muscles, dans le corps vitré de l'œil ou dans le système des vaisseaux sanguins ont déjà été mis au point.
Toutefois, on manque de systèmes sophistiqués pour suivre et contrôler en temps réel les activités des robots à l'intérieur du corps. Les techniques d'imagerie traditionnelles ne conviennent que dans une mesure limitée. L'imagerie par résonance magnétique (IRM) a une résolution temporelle limitée, la tomographie par ordinateur (CT) est associée à une exposition aux radiations et la forte diffusion des ondes sonores limite la résolution locale des ultrasons.
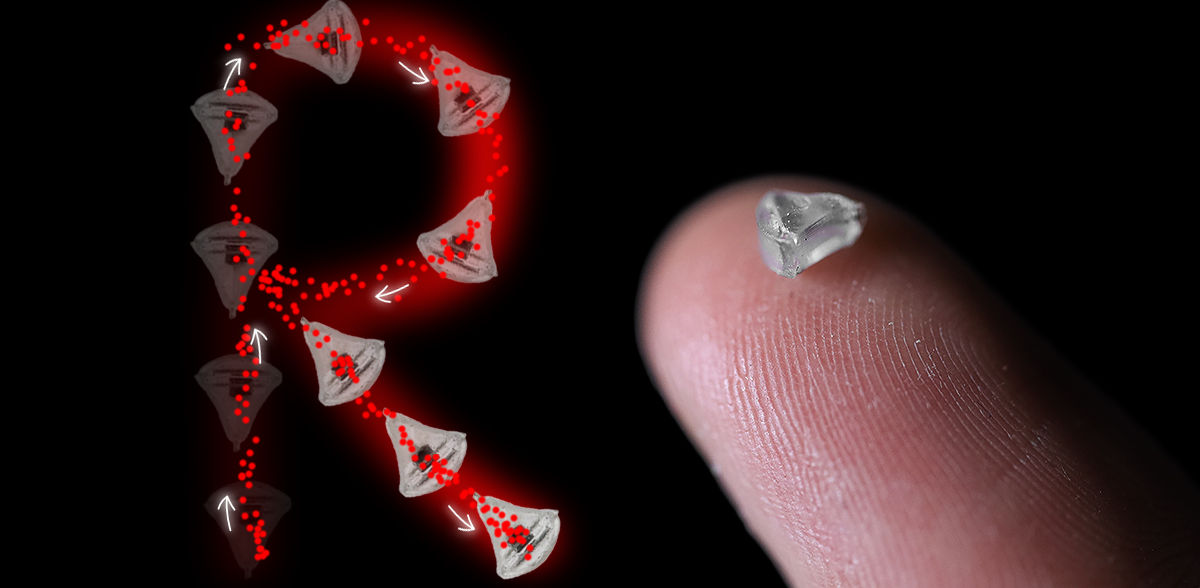
Une équipe dirigée par Tian Qiu du DKFZ de Dresde a inventé une nouvelle méthode pour résoudre ce problème. Le minuscule dispositif qu'ils ont mis au point est basé sur un oscillateur magnétique, c'est-à-dire un aimant qui oscille mécaniquement dans un boîtier de la taille d'un millimètre. Un champ magnétique externe peut faire vibrer mécaniquement l'aimant. Lorsque l'oscillation s'atténue à nouveau, ce signal peut être enregistré à l'aide de capteurs magnétiques. Le principe de base est comparable à la résonance magnétique nucléaire (IRM). Les chercheurs appellent cette méthode "Small-Scale Magneto-Oscillatory Localization" (SMOL).
La SMOL permet de déterminer la position et l'orientation du petit appareil à une grande distance (plus de 10 cm), avec une grande précision (moins de 1 mm) et en temps réel. Contrairement aux méthodes de suivi basées sur des aimants statiques, SMOL peut détecter des mouvements dans les six degrés de liberté et avec une qualité de signal nettement supérieure. Le dispositif étant basé sur des champs magnétiques faibles, il est inoffensif pour le corps, sans fil et compatible avec de nombreux appareils et techniques d'imagerie conventionnels.
"Les applications possibles de la méthode SMOL sont nombreuses", explique Felix Fischer, premier auteur de la présente publication. "Nous avons déjà intégré le système dans des robots miniatures et des instruments pour la chirurgie mini-invasive. Une combinaison avec des endoscopes à capsule ou le marquage des tissus tumoraux pour une radiothérapie très précise serait concevable. Notre méthode pourrait également offrir un avantage décisif pour la robotique chirurgicale entièrement automatisée ou les applications de réalité augmentée."
"SMOL ne nécessite qu'un équipement technique relativement simple. Grâce à ses dimensions de l'ordre du millimètre, l'oscillateur peut être intégré dans de nombreux instruments existants, et il existe encore un potentiel de miniaturisation supplémentaire. Grâce à sa résolution spatiale et temporelle précise, notre technique a le potentiel de faire progresser de manière significative de nombreuses procédures médicales à l'avenir", commente Tian Qiu, auteur principal de la présente publication.
Note: Cet article a été traduit à l'aide d'un système informatique sans intervention humaine. LUMITOS propose ces traductions automatiques pour présenter un plus large éventail d'actualités. Comme cet article a été traduit avec traduction automatique, il est possible qu'il contienne des erreurs de vocabulaire, de syntaxe ou de grammaire. L'article original dans Anglais peut être trouvé ici.
Publication originale




Autres actualités du département science













































