Une nouvelle méthode d'imagerie permet de voir de minuscules robots dans le corps.
Une percée importante dans la fusion efficace de la microrobotique et de l'imagerie
Les microrobots ont le potentiel de révolutionner la médecine. Des chercheurs du Centre Max Planck ETH pour les systèmes d'apprentissage ont mis au point une technique d'imagerie qui, pour la première fois, permet de reconnaître individuellement et à haute résolution des microrobots de taille cellulaire dans un organisme vivant.
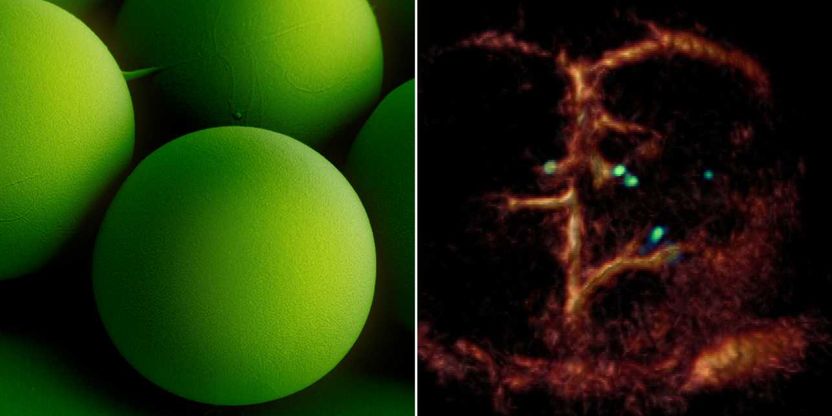
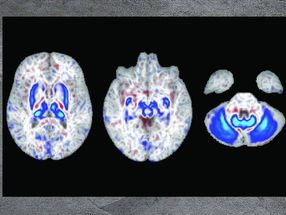
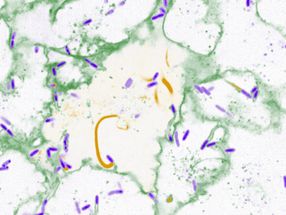
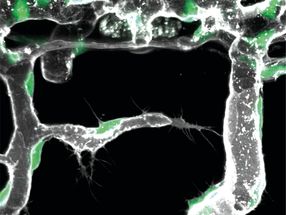
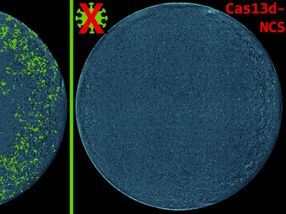
Une avancée décisive : De minuscules microrobots circulants, aussi petits que des globules rouges (photo de gauche), ont été visualisés un par un dans les vaisseaux sanguins de souris grâce à l'imagerie optoacoustique (photo de droite).
ETH Zürich / Max-Planck-Institut für Intelligente Systeme
Comment retirer un caillot de sang du cerveau sans intervention chirurgicale majeure ? Comment administrer précisément un médicament dans un organe malade difficile à atteindre ? Ce ne sont là que deux exemples des innombrables innovations envisagées par les chercheurs dans le domaine de la microrobotique médicale. Les minuscules robots promettent de modifier fondamentalement les traitements médicaux futurs : un jour, ils pourraient se déplacer dans les vaisseaux sanguins des patients pour éliminer les tumeurs malignes, combattre les infections ou fournir des informations diagnostiques précises de manière totalement non invasive. En principe, affirment les chercheurs, le système circulatoire pourrait servir de voie d'acheminement idéale pour les microrobots, puisqu'il atteint tous les organes et tissus du corps.
Pour que ces microrobots puissent effectuer les interventions médicales prévues de manière sûre et fiable, ils ne doivent pas être plus grands qu'une cellule biologique. Chez l'homme, une cellule a un diamètre moyen de 25 micromètres - un micromètre est un millionième de mètre. Les plus petits vaisseaux sanguins de l'homme, les capillaires, sont encore plus fins : leur diamètre moyen n'est que de 8 micromètres. Les microrobots doivent être aussi petits pour pouvoir passer sans encombre dans les plus petits vaisseaux sanguins. Cependant, une telle taille les rend également invisibles à l'œil nu - et la science n'a pas encore trouvé de solution technique pour détecter et suivre individuellement les robots de la taille d'un micromètre lorsqu'ils circulent dans le corps.
Suivre les microrobots en circulation pour la première fois
"Avant que ce scénario futur ne devienne réalité et que les microrobots ne soient effectivement utilisés chez l'homme, la visualisation et le suivi précis de ces minuscules machines sont absolument nécessaires", explique Paul Wrede, qui est chercheur doctoral au Centre Max Planck ETH pour les systèmes d'apprentissage (CLS). "Sans imagerie, la microrobotique est essentiellement aveugle", ajoute Daniel Razansky, professeur d'imagerie biomédicale à l'ETH Zurich et à l'Université de Zurich et membre du CLS. "L'imagerie en temps réel et à haute résolution est donc essentielle pour détecter et contrôler les microrobots de taille cellulaire dans un organisme vivant." En outre, l'imagerie est également une condition préalable pour surveiller les interventions thérapeutiques effectuées par les robots et vérifier qu'ils ont accompli leur tâche comme prévu. "L'absence de capacité à fournir un retour d'information en temps réel sur les microrobots était donc un obstacle majeur sur la voie de l'application clinique."
Avec Metin Sitti, un expert mondial en microrobotique qui est également membre du CLS en tant que directeur de l'Institut Max Planck pour les systèmes intelligents (MPI-IS) et professeur d'intelligence physique à l'ETH, et d'autres chercheurs, l'équipe a maintenant réalisé une percée importante en fusionnant efficacement la microrobotique et l'imagerie. Dans une étude qui vient d'être publiée dans la revue scientifique Science Advances, ils sont parvenus pour la première fois à détecter clairement et à suivre en temps réel de minuscules robots de cinq micromètres seulement dans les vaisseaux cérébraux de souris en utilisant une technique d'imagerie non invasive.
Les chercheurs ont utilisé des microrobots dont la taille varie de 5 à 20 micromètres. Les plus petits robots ont la taille des globules rouges, dont le diamètre est de 7 à 8 micromètres. Cette taille permet aux microrobots injectés par voie intraveineuse de se déplacer même à travers les microcapillaires les plus fins du cerveau de la souris.
Les chercheurs ont également développé une technologie de tomographie optoacoustique dédiée afin de détecter les minuscules robots un par un, en haute résolution et en temps réel. Cette méthode d'imagerie unique permet de détecter les petits robots dans des régions profondes et difficiles d'accès du corps et du cerveau, ce qui n'aurait pas été possible avec la microscopie optique ou toute autre technique d'imagerie. La méthode est dite optoacoustique car la lumière est d'abord émise et absorbée par le tissu concerné. L'absorption produit ensuite de minuscules ondes ultrasonores qui peuvent être détectées et analysées pour donner des images volumétriques à haute résolution.
Robots à face de Janus avec couche d'or
Pour rendre les microrobots très visibles sur les images, les chercheurs avaient besoin d'un agent de contraste approprié. Pour leur étude, ils ont donc utilisé des microrobots sphériques, à base de particules de silice, avec un revêtement dit de type Janus. Ce type de robot a une conception très robuste et est très bien adapté aux tâches médicales complexes. Il doit son nom au dieu romain Janus, qui avait deux visages. Dans les robots, les deux moitiés de la sphère sont revêtues différemment. Dans l'étude actuelle, les chercheurs ont recouvert une moitié du robot de nickel et l'autre moitié d'or.
"L'or est un très bon agent de contraste pour l'imagerie optoacoustique", explique Razansky, "sans la couche d'or, le signal généré par les microrobots est tout simplement trop faible pour être détecté." En plus de l'or, les chercheurs ont également testé l'utilisation de petites bulles appelées nanoliposomes, qui contenaient un colorant vert fluorescent servant également d'agent de contraste. "Les liposomes présentent également l'avantage de pouvoir être chargés de médicaments puissants, ce qui est important pour les futures approches d'administration ciblée de médicaments", explique Wrede, premier auteur de l'étude. Les utilisations potentielles des liposomes seront étudiées dans une étude de suivi.
En outre, l'or permet également de minimiser l'effet cytotoxique du revêtement de nickel - après tout, si à l'avenir les microrobots doivent fonctionner sur des animaux ou des humains vivants, ils doivent être rendus biocompatibles et non toxiques, ce qui fait partie d'une recherche en cours. Dans la présente étude, les chercheurs ont utilisé du nickel comme support d'entraînement magnétique et un simple aimant permanent pour tirer les robots. Dans des études de suivi, ils veulent tester l'imagerie optoacoustique avec des manipulations plus complexes utilisant des champs magnétiques rotatifs.
"Cela nous donnerait la possibilité de contrôler et de déplacer avec précision les microrobots, même dans du sang à fort débit", explique Metin Sitti. "Dans la présente étude, nous nous sommes concentrés sur la visualisation des microrobots. Le projet a été couronné de succès grâce à l'excellent environnement collaboratif du CLS qui a permis de combiner l'expertise des deux groupes de recherche du MPI-IS à Stuttgart pour la partie robotique et de l'ETH Zurich pour la partie imagerie", conclut Sitti.
Note: Cet article a été traduit à l'aide d'un système informatique sans intervention humaine. LUMITOS propose ces traductions automatiques pour présenter un plus large éventail d'actualités. Comme cet article a été traduit avec traduction automatique, il est possible qu'il contienne des erreurs de vocabulaire, de syntaxe ou de grammaire. L'article original dans Anglais peut être trouvé ici.
Publication originale
Autres actualités du département science














Recevez les dernières actualités du secteur des sciences de la vie
Ne manquez plus aucune actualité : notre newsletter consacrée aux biotechnologies, au secteur pharmaceutique et aux sciences de la vie vous informe tous les mardis et jeudis. Les dernières nouvelles du secteur, les produits phares et les innovations - de manière compacte et compréhensible dans votre boîte de réception. Recherché par nos soins, pour que vous n'ayez pas à le faire.